DLG-Field Robot Event: Erfolgreiche virtuelle Premiere
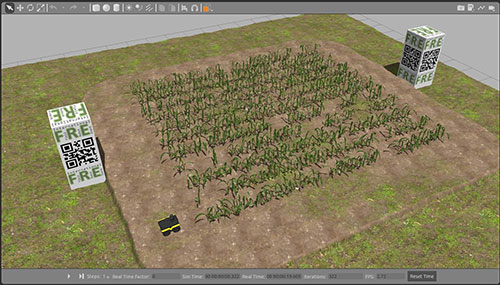
Der jährliche Wettbewerb für Studententeams und ihre Feldroboter wurde in diesem Jahr mit Hilfe einer Simulationsumgebung durchgeführt, wie sie bei der „NASA Space Robotics Challenge“ zum Testen von Robotersoftware für die Weltraumforschung zum Einsatz kommt. Die virtuelle Veranstaltung bot damit den Teilnehmern realistische Designs mit realen Effekten, um eine Reihe von landwirtschaftlichen Feldszenarien nachzustellen.
Gesamtsieger: Team „Bullseye“ der Universität Wageningen
Die Roboter mussten über viele Fähigkeiten verfügen, die im Vorfeld als Steuerungsalgorithmen einprogrammiert worden waren: Navigieren entlang gekrümmter Pflanzenreihen, das Erfassen und Unterscheiden von Objekten und das georeferenzierte Kartieren dieser Objekte. Dies erforderte viele Monate Entwicklungsarbeit im Vorfeld.
Eine weitere schwierige Aufgabe war das Entfernen von Unkraut und Getränkedosen. Hierfür musste eine genaue Software der Aktoren funktionieren, die die Werkzeuge steuern.
Der Gesamtsieger des Internationalen Field Robot Events wurde das Studententeam „Bullseye“ der Universität Wageningen (Niederlande). Es überzeugte in den gestellten Feldaufgaben zu den Themen Navigation, Objekterkennung und -entfernung. Die Freestyle-Aufgabe, in dem die studentischen Teams ihre Ingenieurskunst bei der Lösung einer landwirtschaftlichen Aufgabe ihrer Wahl unter Beweis stellen mussten, gewann das Team Ceres der Fachhochschule Münster mit seinem Ernteroboter für Kürbisse.
Mitschnitt in der DLG-Mediathek
Ein Mitschnitt des Internationalen Field Robot Events mit allen Aufgaben und Ergebnissen ist unter folgenden Links veröffentlicht:
8 Juni: Navigation in a maize field with curved rows; Straight rows with missing plants.
9 Juni: Weed and object detection and georeferencing; removal to the headland
10 Juni: Freestyle Event
Hier der Link zu ausführlichen Informationen zu den Gewinnern.